

Si vous suivez un peu l’actualité de Blue Robotics, vous avez déjà entendu parler de ce nouveau moyen d’étanchéifier vos entrées de câble. Mais qu’en est il exactement ?
Jusqu’ici, pour réaliser une pénétration de câble dans une enceinte étanche, le moyen le plus couramment employé consistait à utiliser un pénétrateur à résiner. ( je passe volontairement sur les presse-étoupe classiques qui ne sont pas fiables au delà de quelques mètres d’immersion ! )
Les inconvénients de ce type de pénétrateurs sont nombreux : mise en œuvre délicate ( dégraissage soigneux / préparation du câble ), injection de la résine, coût de la résine en raison des quantités minimales, temps de mise en œuvre et de séchage, …
Sans compter, qu’en fonction de l’application et de la maitrise de l’opérateur, les résultats en terme d’étanchéité se situent quelque part entre la perfection et la catastrophe !
Il fallait donc simplifier et fiabiliser le processus, ô combien nécessaire en robotique sous-marine, d’étanchéification des entrées de câbles. Après beaucoup de réflexion et encore plus de tests, Blue Robotics a donc créé la gamme Wetlink !
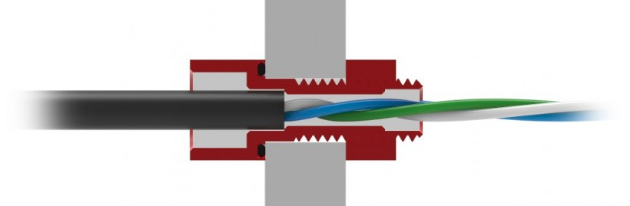
Soyons clair, un pénétrateur WetLink est une version optimisé du classique “presse étoupe”, mais, ici comme ailleurs, “le diable est dans les détails” !

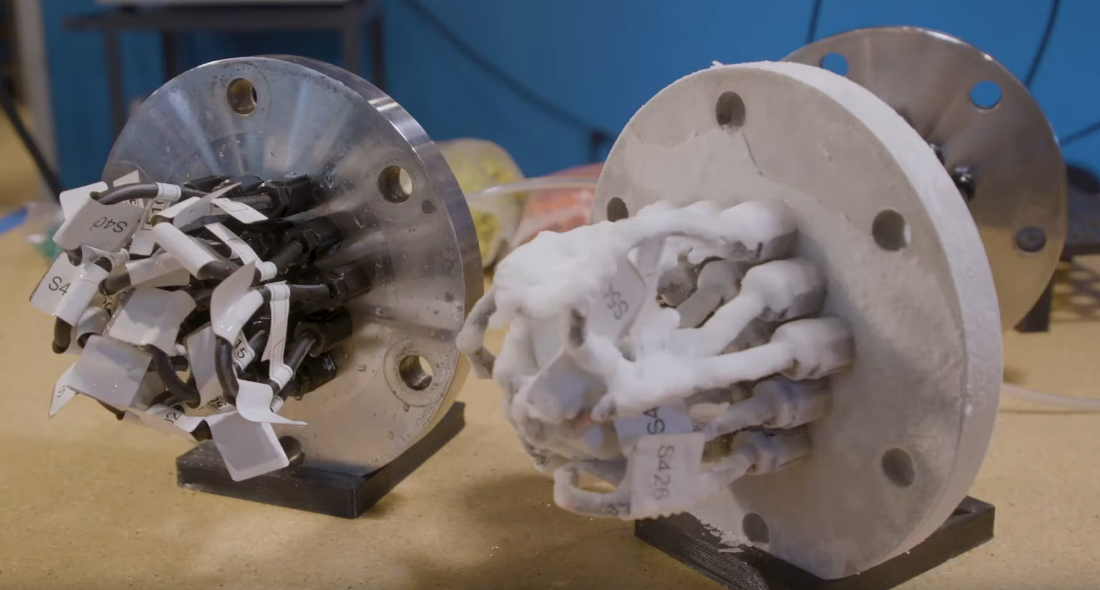
Malgré la simplicité du concept, Blue Robotics a accordé beaucoup d’attention aux détails pour assurer une fiabilité absolue. Les pénétrateurs WetLink ont étés soumis à un processus de test et de validation rigoureux au cours duquel ont étés testés des milliers d’échantillons dans des conditions extrêmes : haute pression, températures chaudes et froides, courant électrique élevé, vieillissement accéléré et contrainte mécanique.
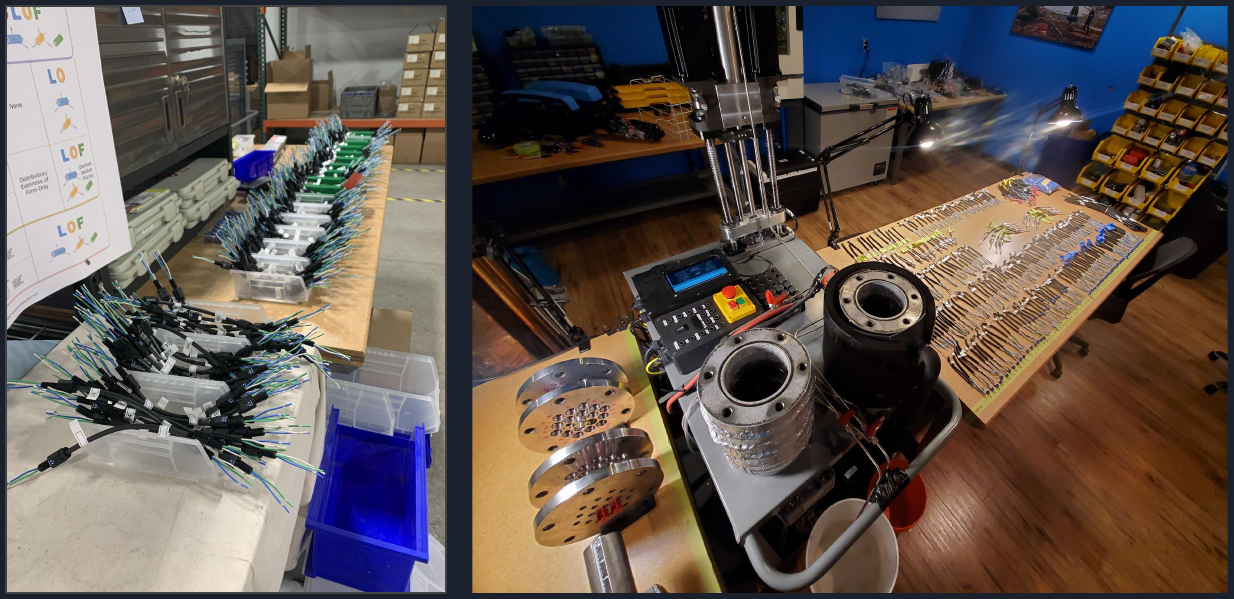
Des tests particulièrement rigoureux ont étés menés à l’aide de caissons étanches spécifiquement conçus pour réaliser des cycles de mise en pression dans une large gamme de température.
Du coté de la simplicité, pour éliminer une source potentielle de problème, un codage couleur est utilisé : chaque couleur correspond à une taille. Par exemple : les pénétrateurs de 6,5mm ( dimension nominale ) sont bleu.
La couleur est reprise à la fois par le joint et par l’embase, ce qui devrait éviter toute erreur. ( à moins d’y mettre beaucoup de mauvaise volonté ! )
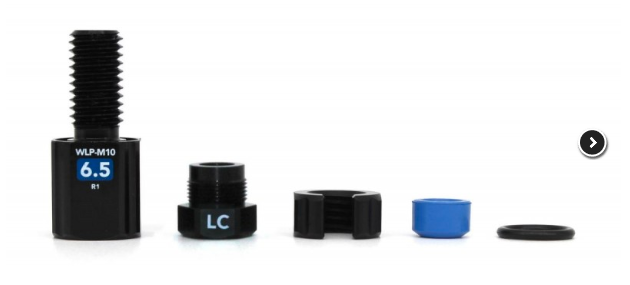
Si vous êtes observateur, vous aurez noté que le bouchon ( la pièce qui comprime le joint à l’intérieur du corps ), est tantôt marqué “LC” , tantôt “HC”. La différence réside dans la longueur du bouchon, afin de comprimer plus ou moins le joint à l’intérieur de l’embase. En changeant ainsi la taille du bouchon, on augmente encore la plage de diamètres de câbles utilisables.
Pour reprendre l’exemple du pénétrateur taille 6,5mm , il s’adaptera à des câbles de diamètre compris entre 6,2 et 6,8mm s’il est équipé d’un bouchon LC et entre 5,7 et 6,3mm avec un bouchon HC.
Les anglophiles l’auront compris, LC signifie “Low Compression” ( compression faible ) et HC signifie “High compression” ( compression forte ).
Dernier détail, la gamme comprend 3 tailles de filetage d’embase : M6 , M10 et M14
Les tailles M6 et M14 correspondent respectivement à un diamètre nominal de câble de 4,5 et 9,5mm , tandis que la taille M10 couvre quasiment tous les diamètres, soit de 4,5 à 8,5mm


Pour plus de clarté, le tableau ci-contre détaille toutes les possibilités de la gamme.
Dans un prochain article nous verrons en détail comme bien choisir et assembler un pénétrateur Wetlink …