

Ça faisait un moment que j’en avais envie …
Faire un ROV en impression 3D !
Faire un ROV de type “cage” est (relativement) facile, mais dés que l’on veut faire un engin caréné, la difficulté ( et le prix ! ) augmentent rapidement. L’idée me trottait donc dans la tête depuis un moment : faire un petit ROV avec un carénage entièrement réalisé en impression 3D.
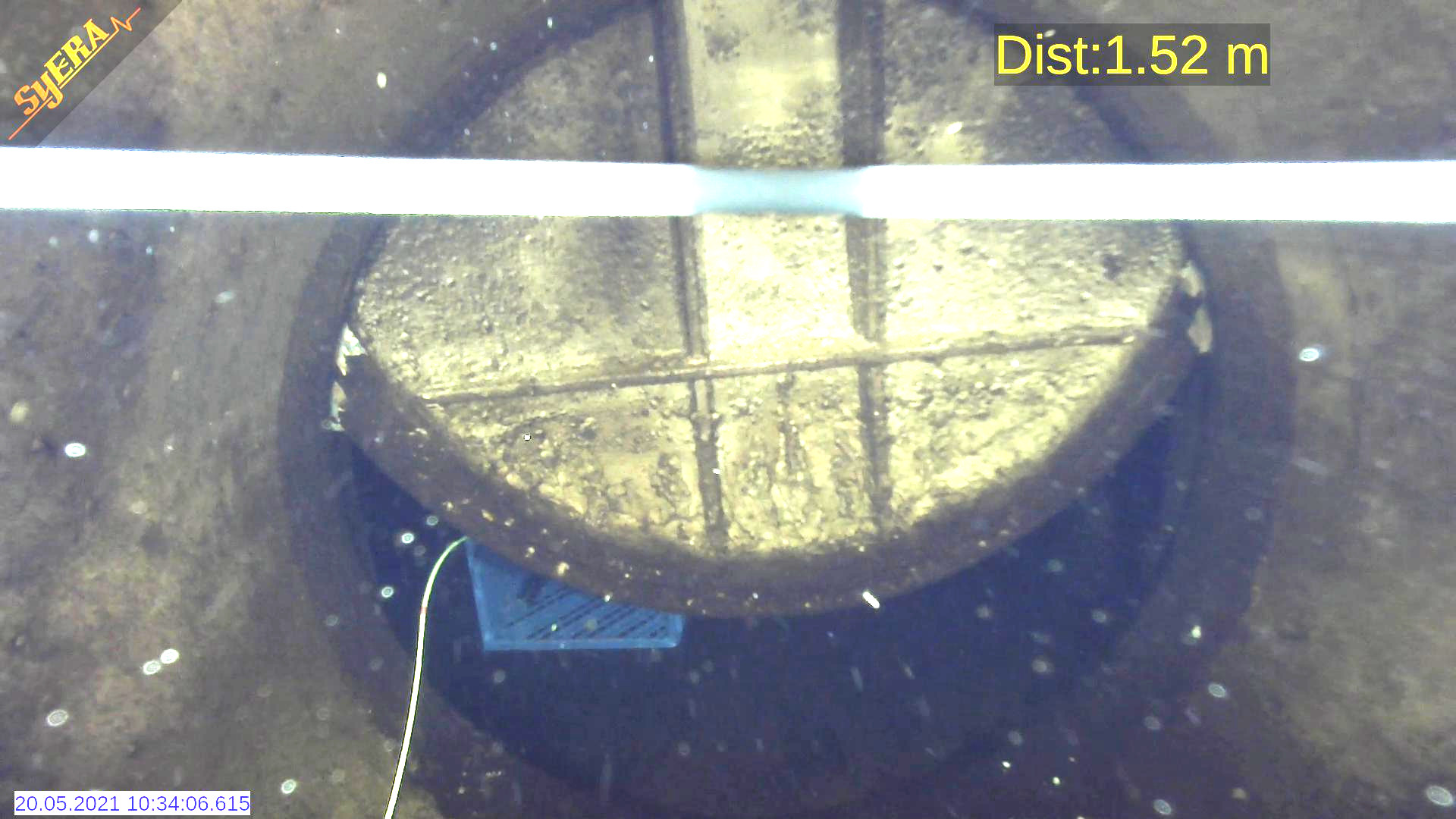
L’occasion m’en a été donné lorsqu’un client m’a demandé si je pouvais réaliser une inspection dans une conduite de DN600 ( diamètre intérieur 60cm ), accessible seulement par une vanne bloquée en position 2/3 fermée. ( moins de 20cm de passage … )
Ainsi est né le projet “Furet” !

Ce qui fut dit fut fait ! Après pas mal de temps passé sur la conception et la CAO, les premières pièces prirent forme …
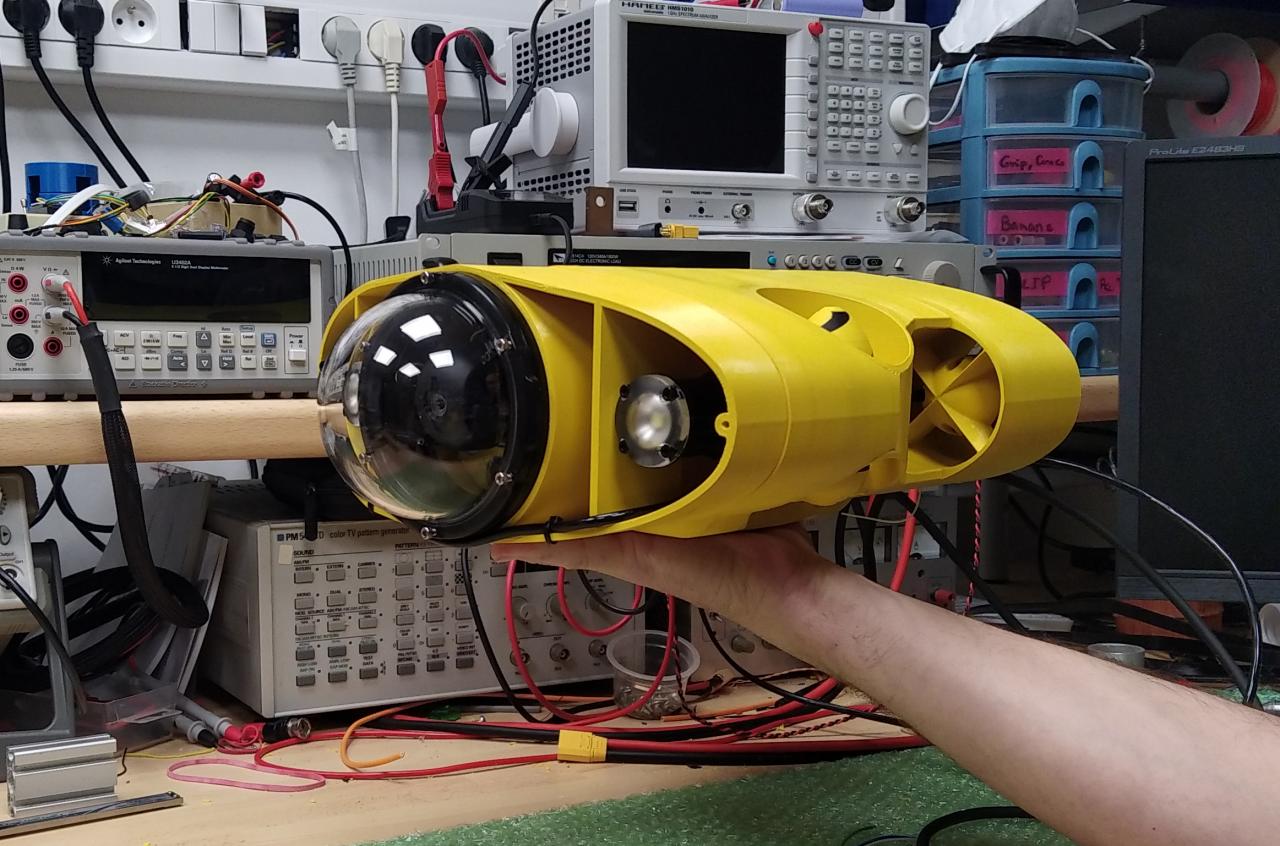
Le ROV est conçu autour d’un caisson étanche 4 pouces de Blue Robotics. L’ensemble de l’électronique, ainsi qu’une batterie spécialement conçue y prennent place. Coté propulsion, ce sont 4 propulseurs T200 fortement modifiés ( suppression de la tuyère et des supports moteur, réduction du diamètre des hélices, … ) qui seront intégrés dans les éléments de coque imprimés.
Les tests réalisés sur la première version, bien que concluants, ont mis en évidence quelques problèmes d’équilibrage et de comportement. C’est une des principales difficulté de ce type d’engin très compact : arriver à tout intégrer tout en veillant à une bonne répartition des masses.
Après quelques modifications, dont un petit allongement de l’ensemble, les tests furent concluants, et le bébé autorisé à partir à l’aventure …

Mais ceci est une autre histoire !